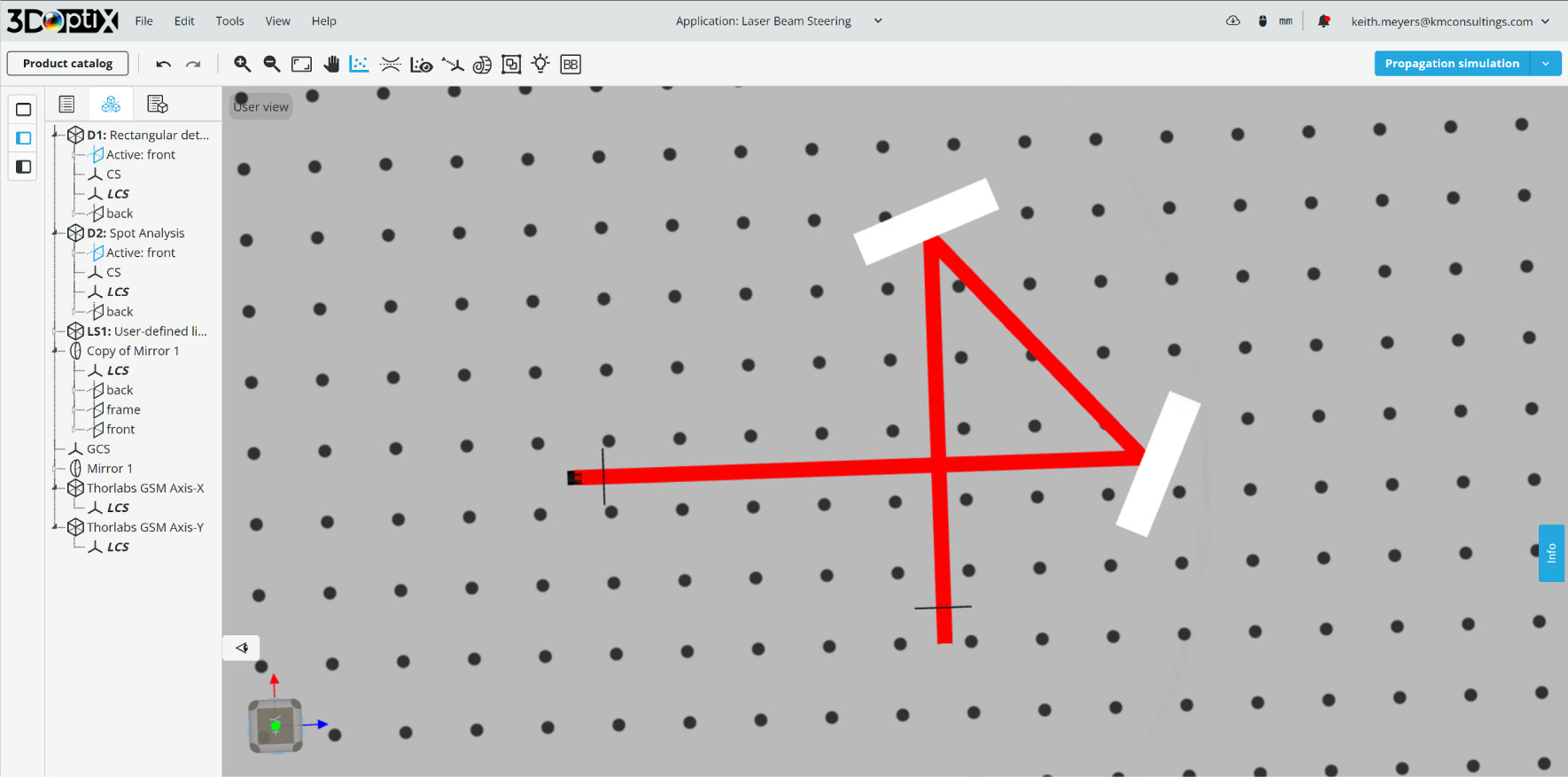
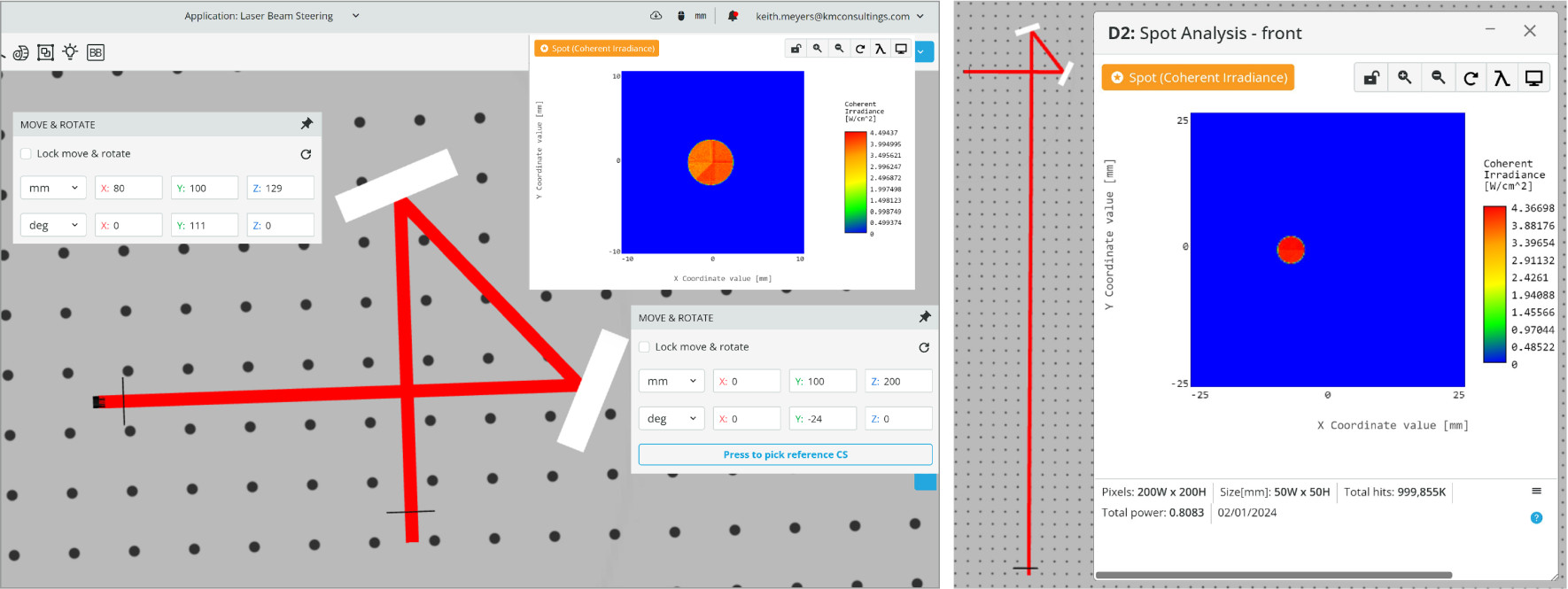
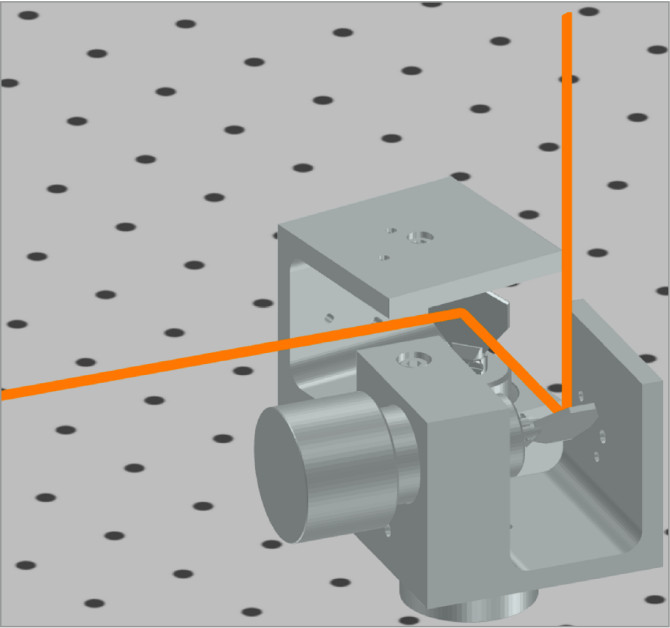
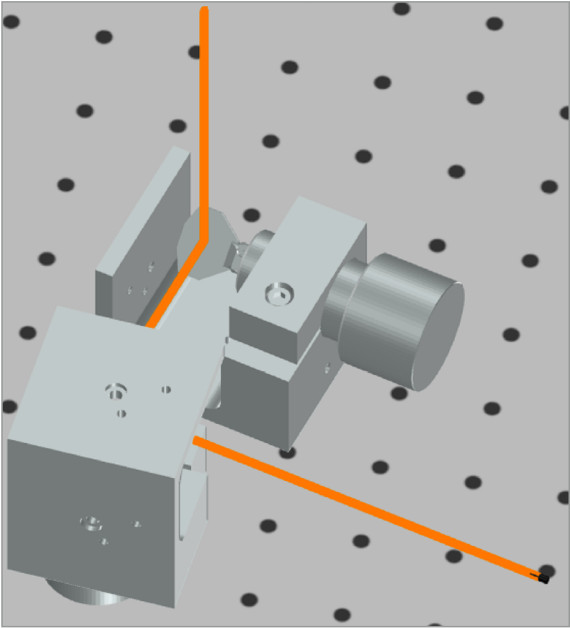
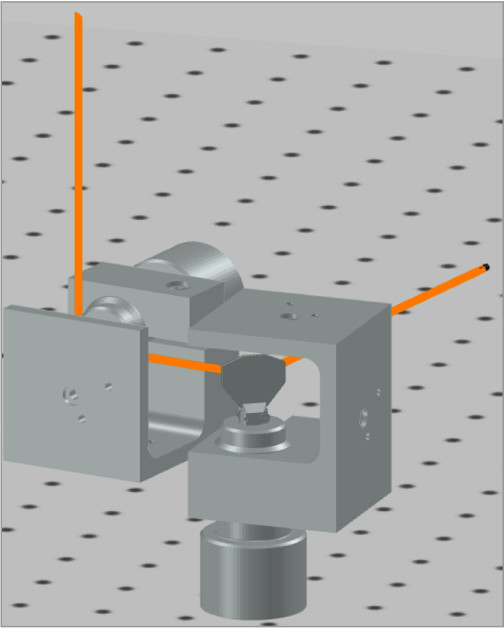
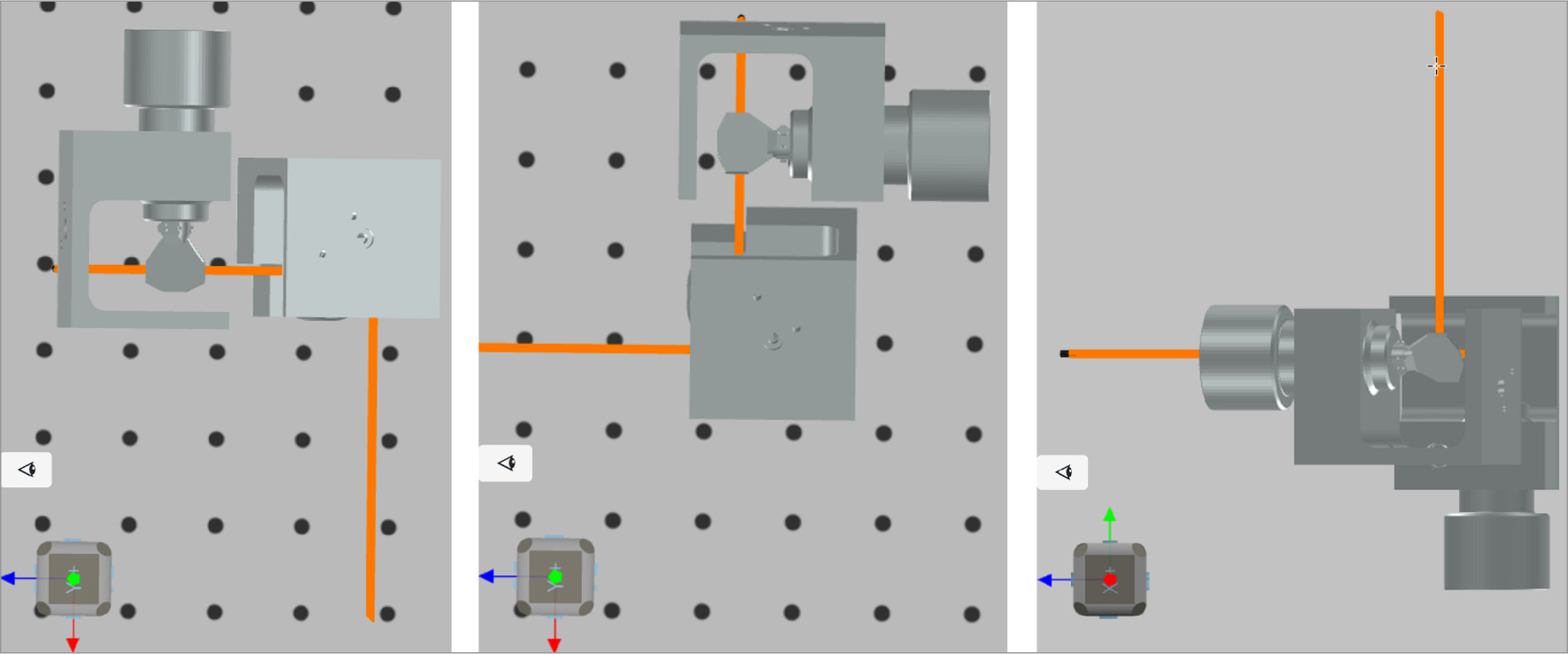
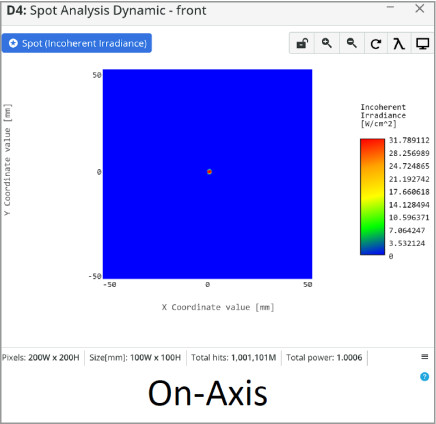
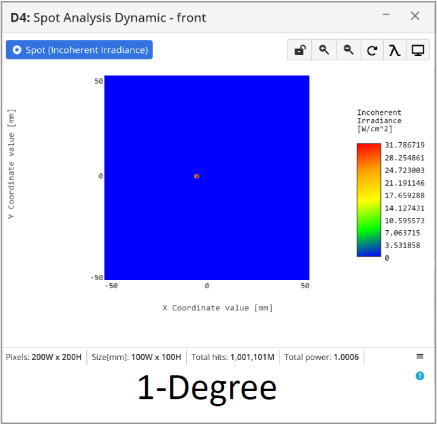
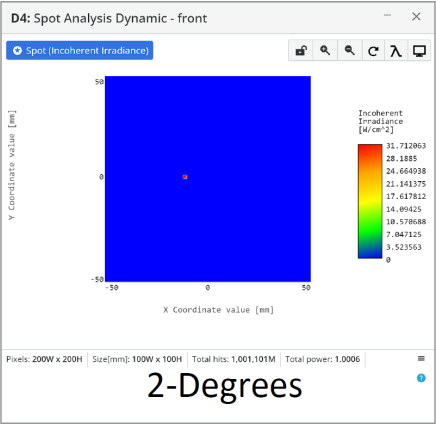
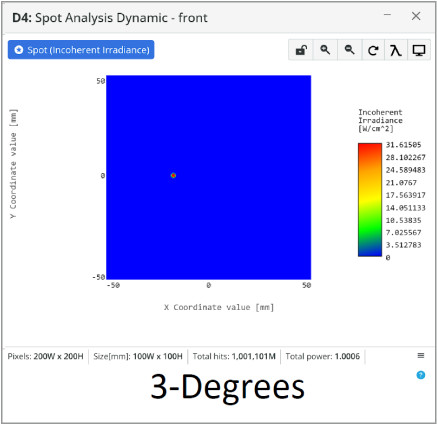
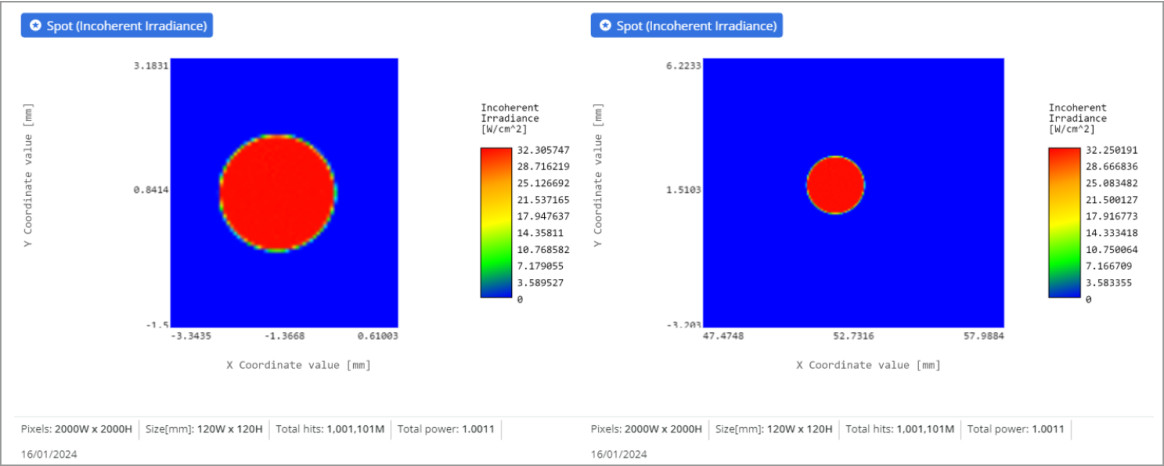
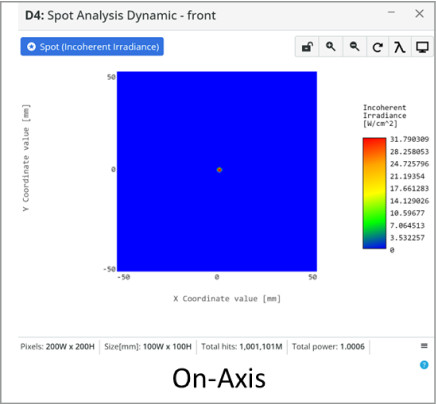
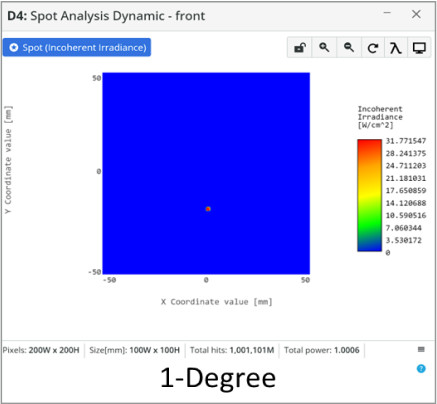
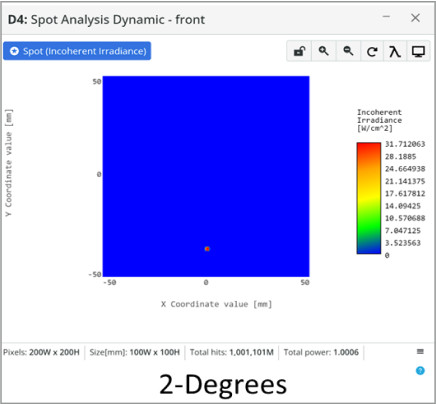
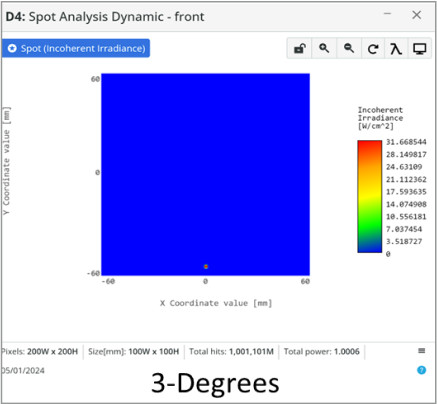
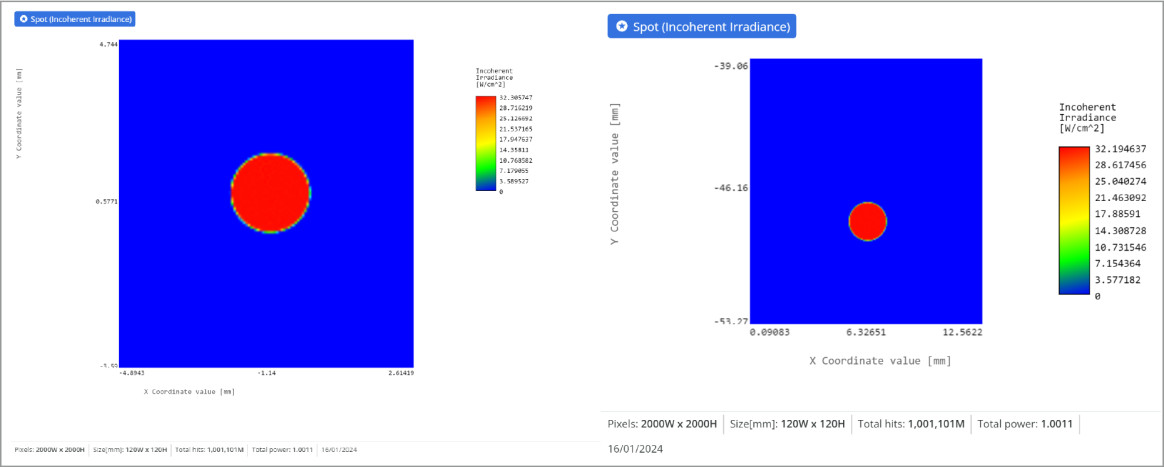
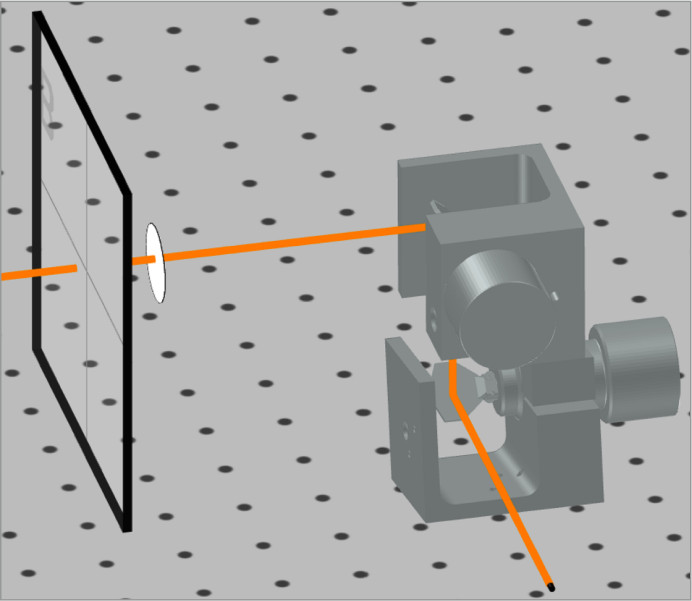
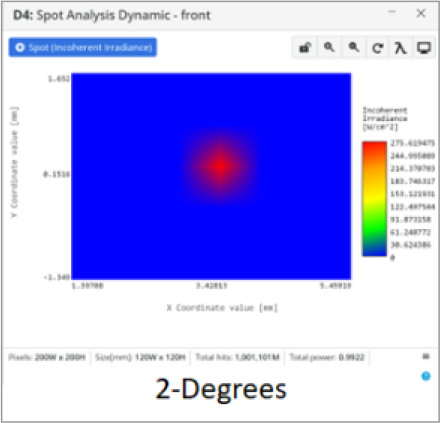
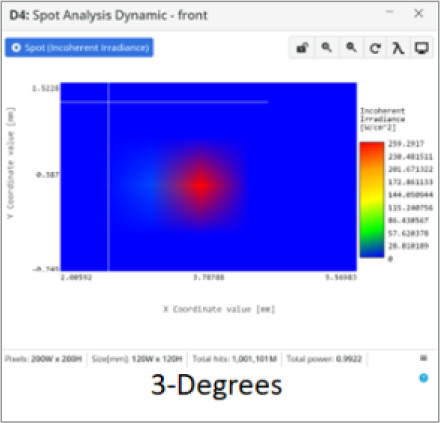
Images of the nominal configuration, and shifted configuration (2-degree shift in mirrors 1 and 2) are shown below. The spot detector has been moved 1080 mm from mirror 2 to show the straightness of the beam and the accurate horizontal shift.
This setup is useful for alignment applications steering the beam onto the target and keeping the incident angle zero with respect to the target surface. This can be important if Fresnel reflections at steep angles are undesirable, such as testing the spectral sensitivity of photo-detectors. The spatial profile of the laser beam is unchanged at the target plane maintaining high spatial quality. Additional adjustments can be made, but the repeatability of this steering system is low.
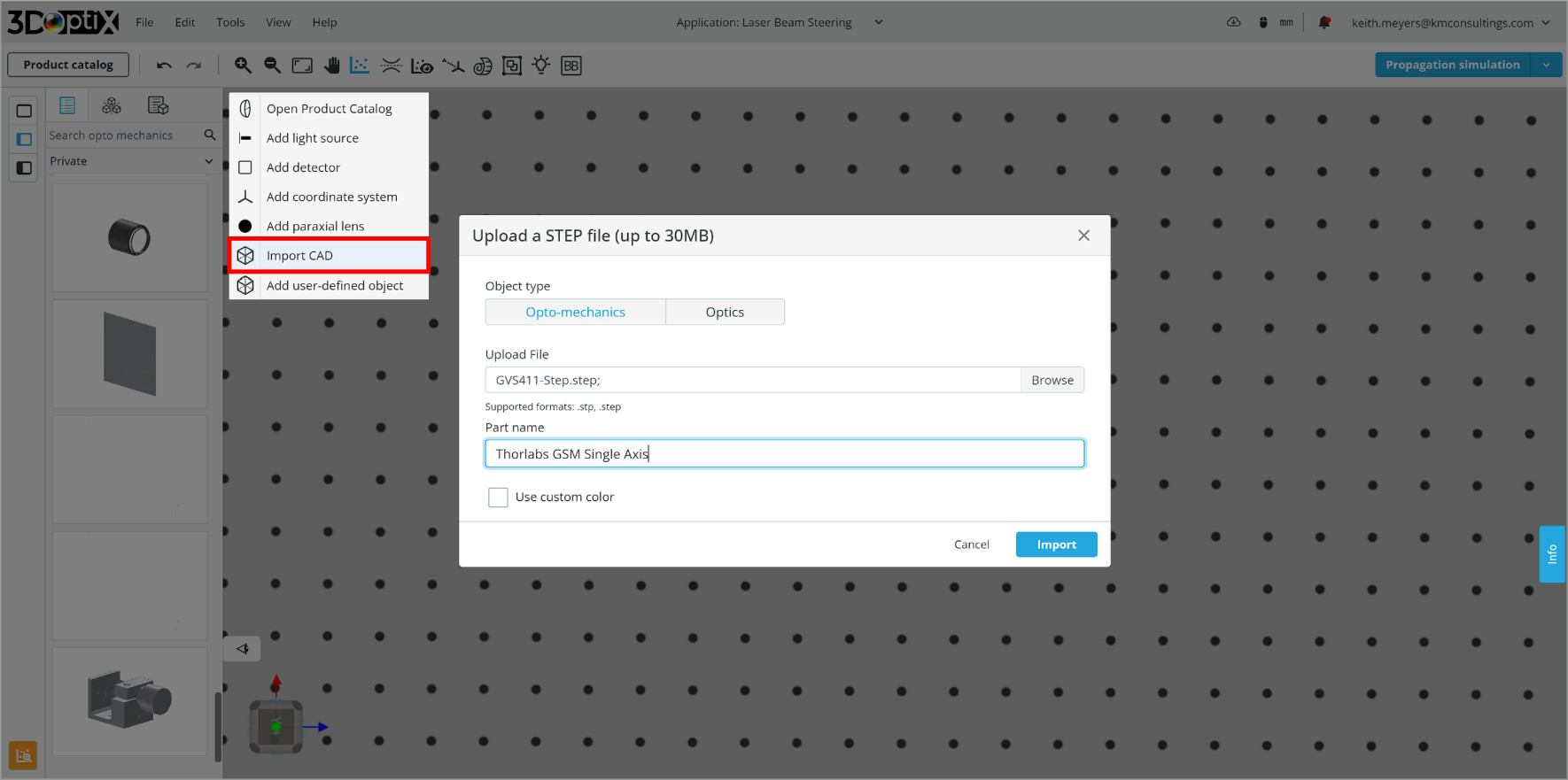
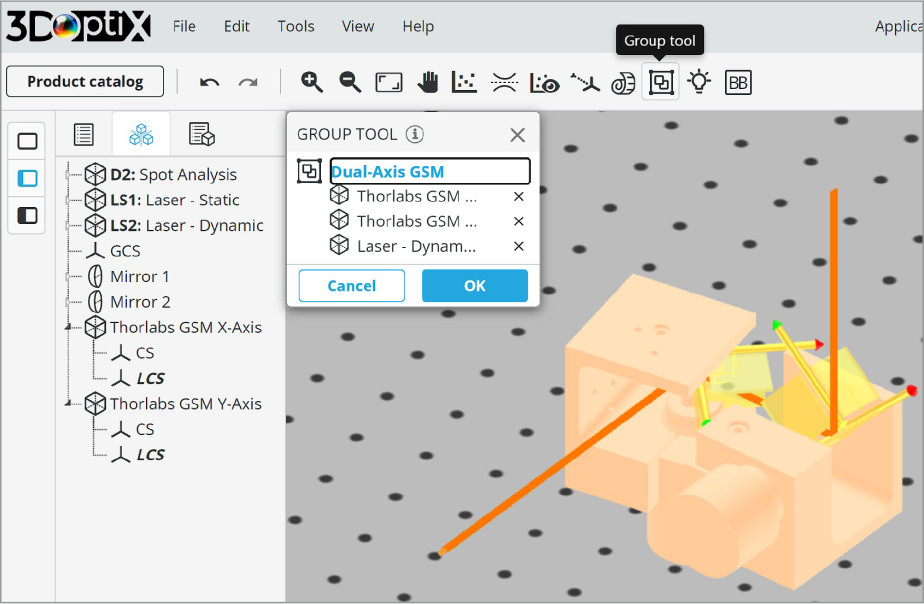
The next optical system consists of a dynamic steering system with the following components:
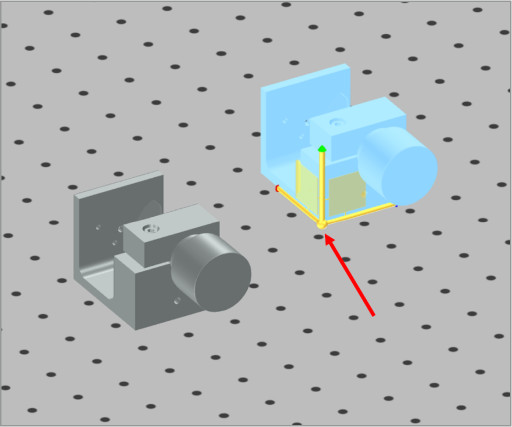
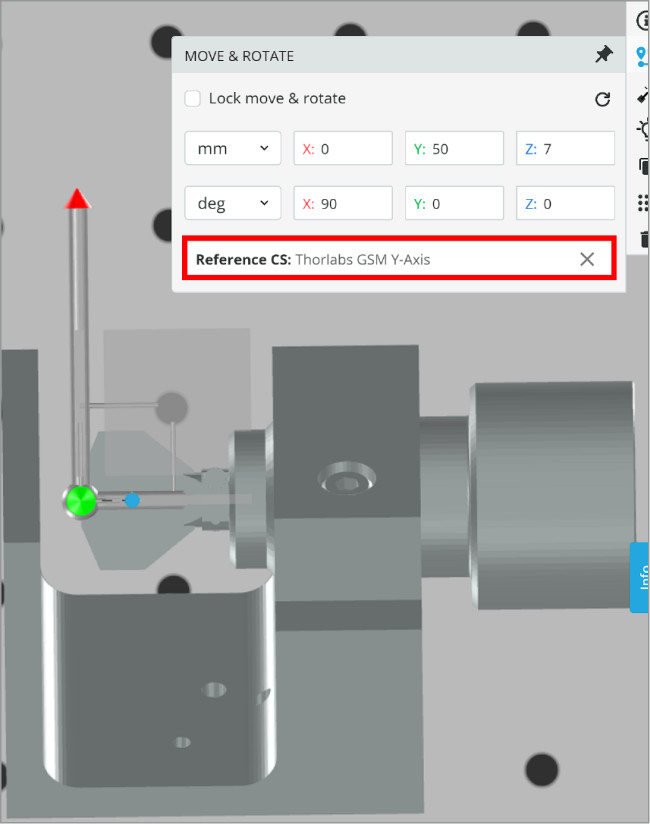
We want to simulate a dual axis galvo-scanning mirror (GSM) and to do this we will upload two individual single axis GSM CAD files. The reason for this is CAD files are not able to separately move individual parts, so the entire object must be moved. With this method, we can use the two CAD files to simulate individual mirror motion.