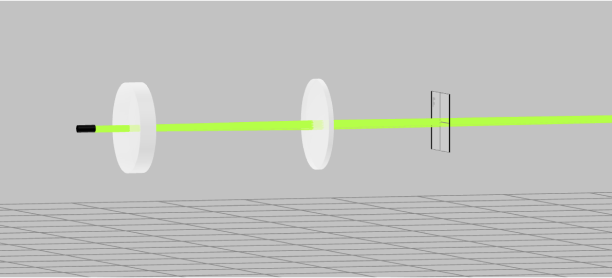
Exercise 1: Setting up a source, a positive and a negative lens
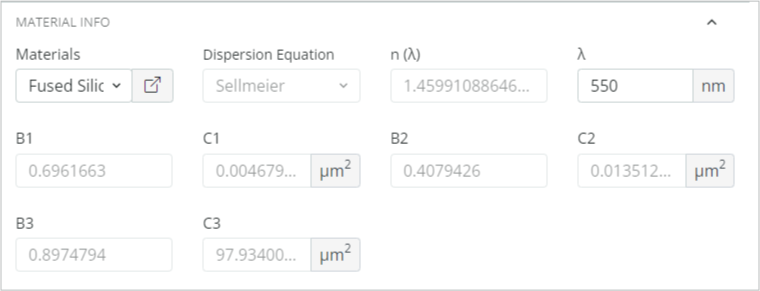
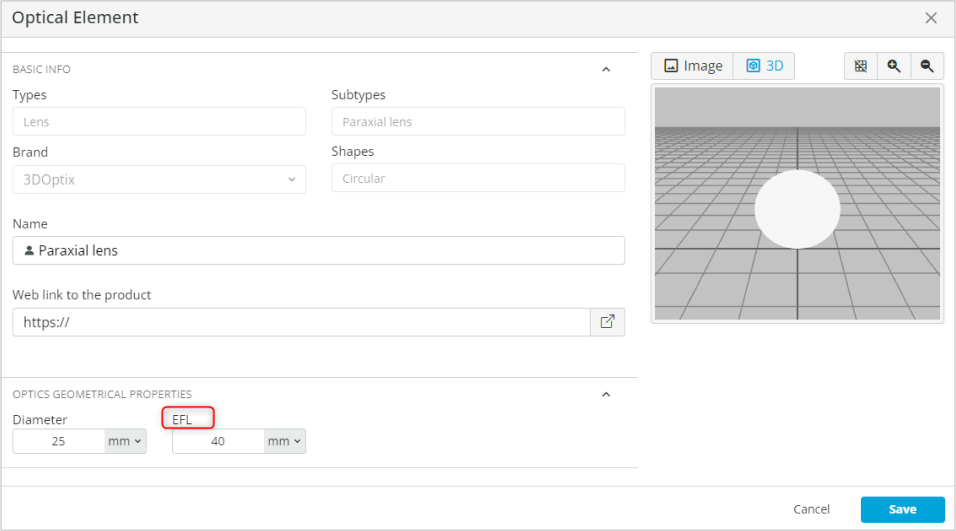
Exercise 2: Defining optical properties and embodiment information
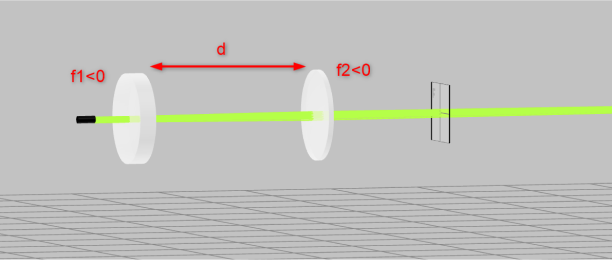


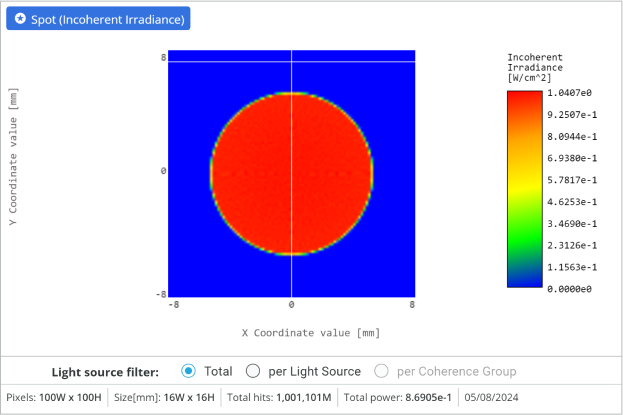
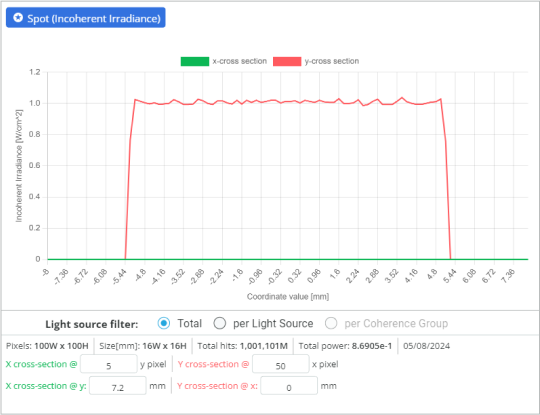
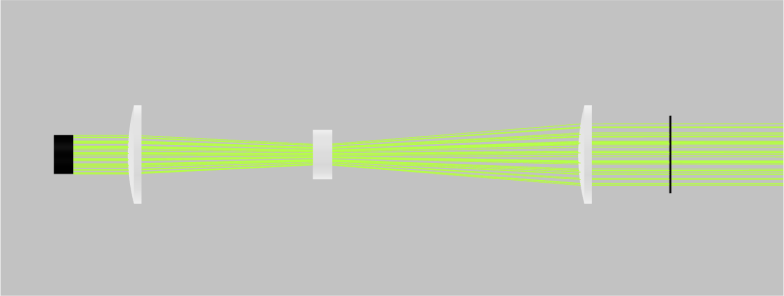
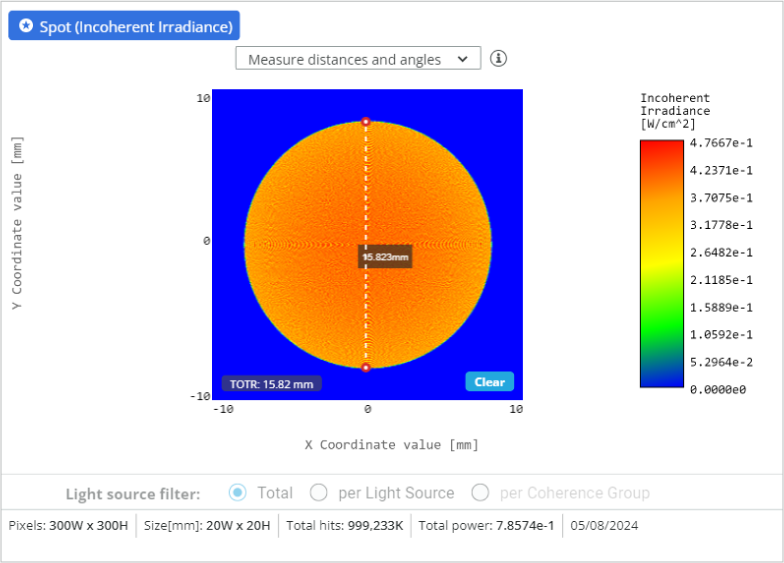
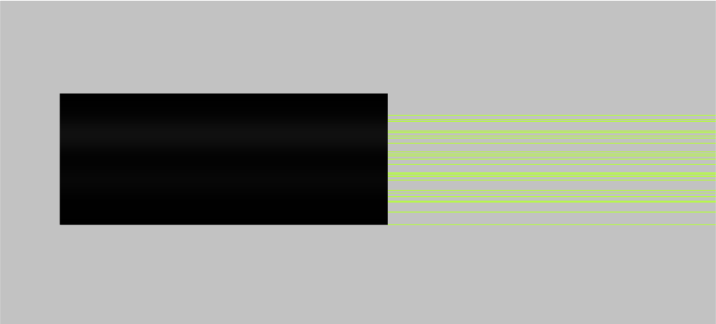
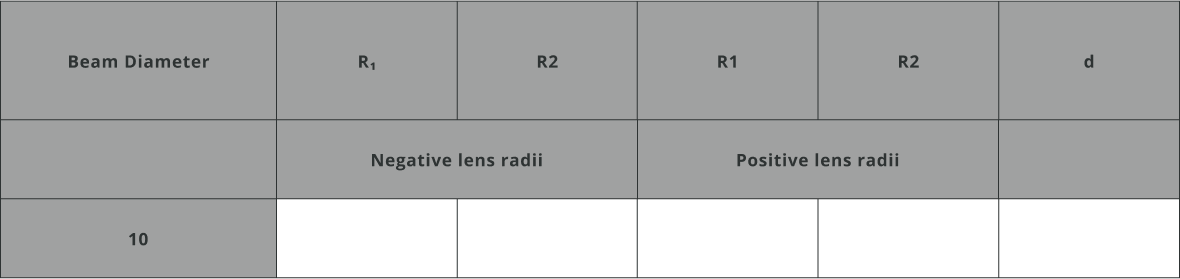
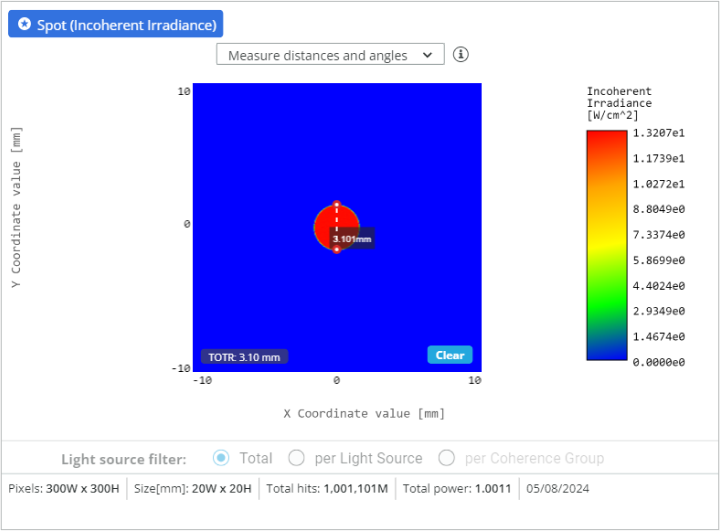
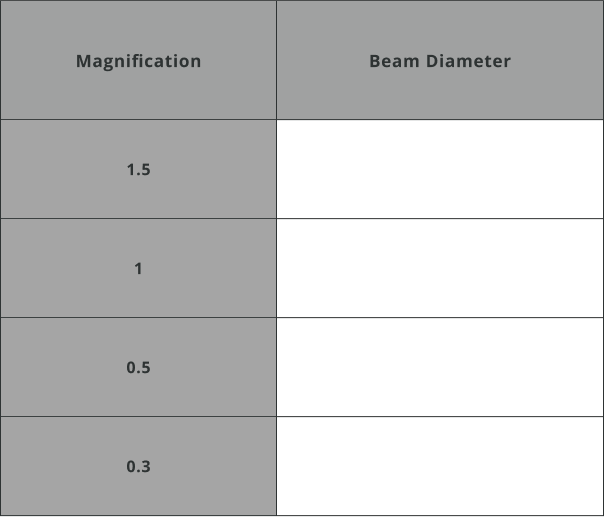
- Although the beam is fairly collimated, the beam diameter is slightly larger. This is due to the fact that the beam has a small divergence and further optimization is needed. Try to reduce the beam diameter as close as possible to 10mm by changing the radii of two lenses or changing the distances between the lenses.
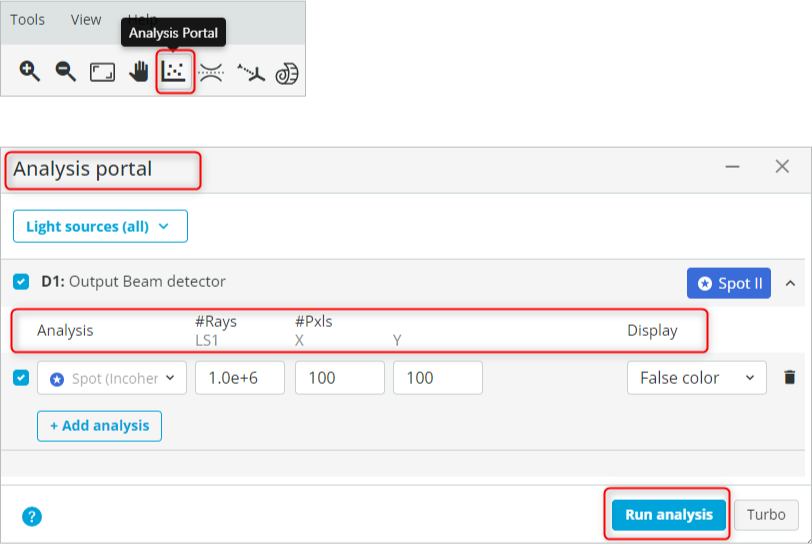
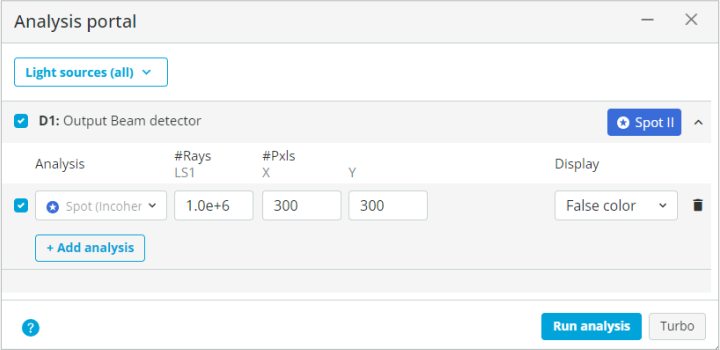
 The number of detector pixels can also be changed to get a sharp beam profile output.
The number of detector pixels can also be changed to get a sharp beam profile output.
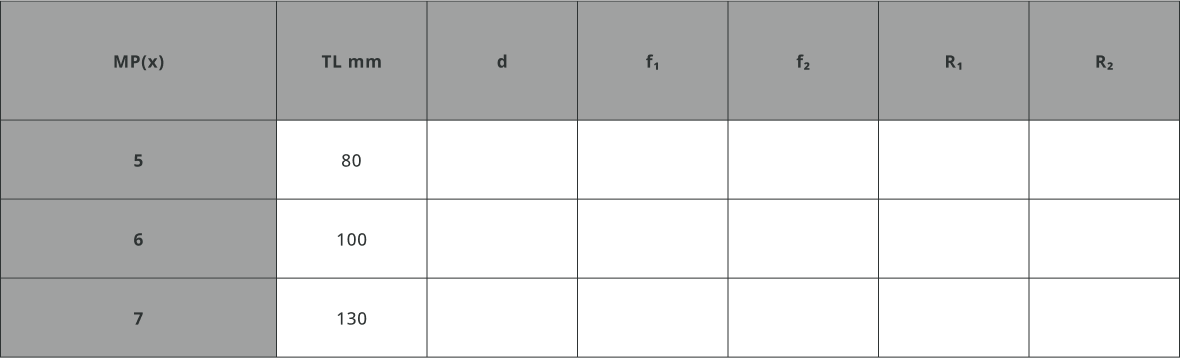
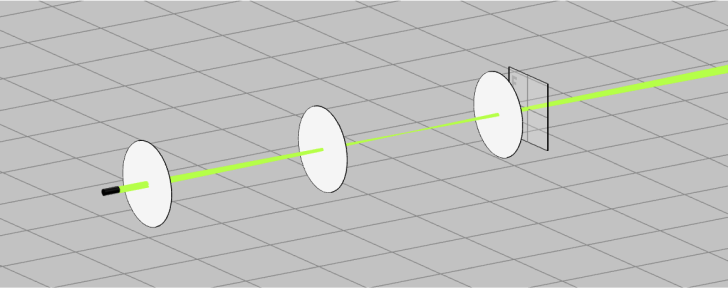
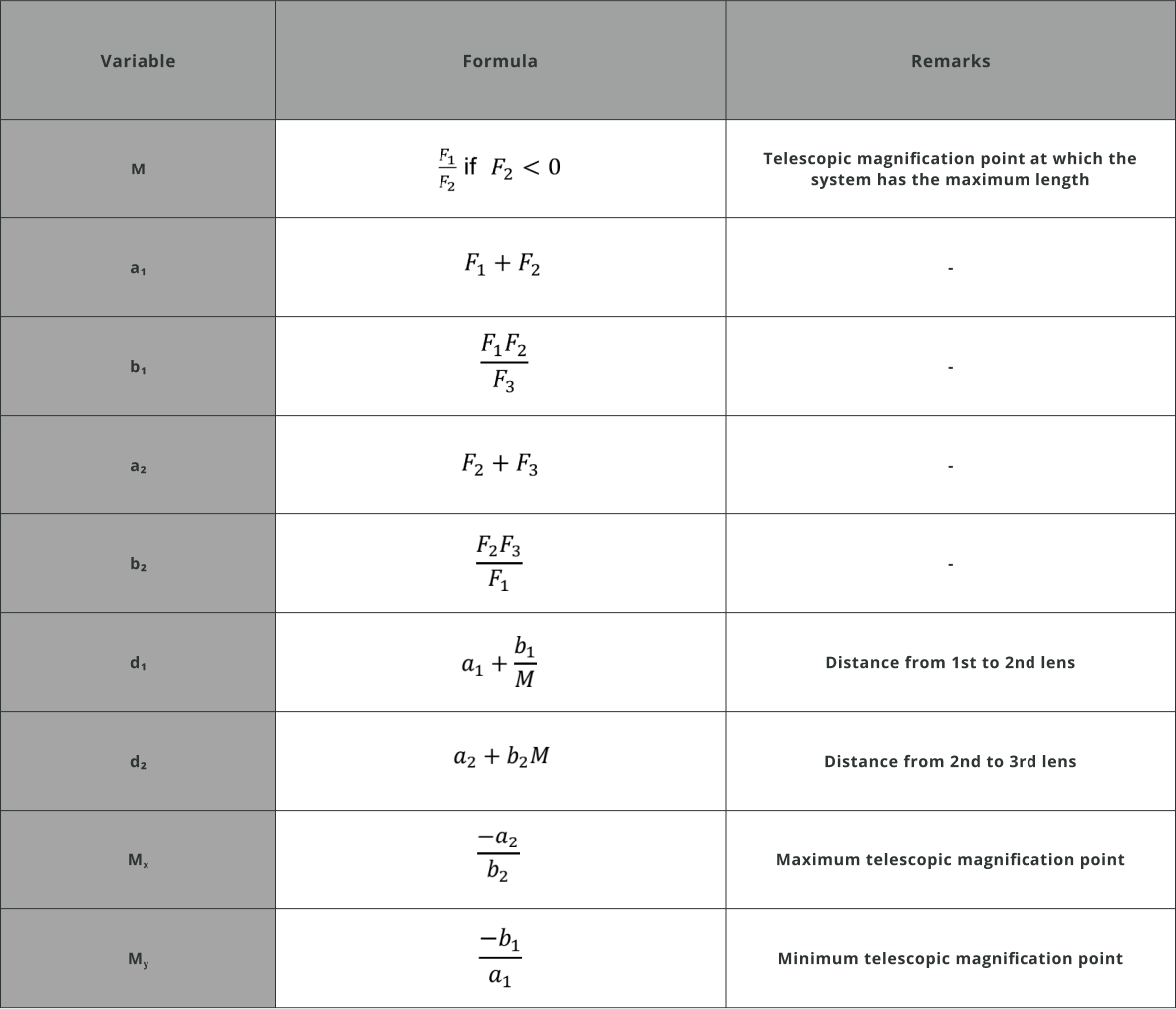
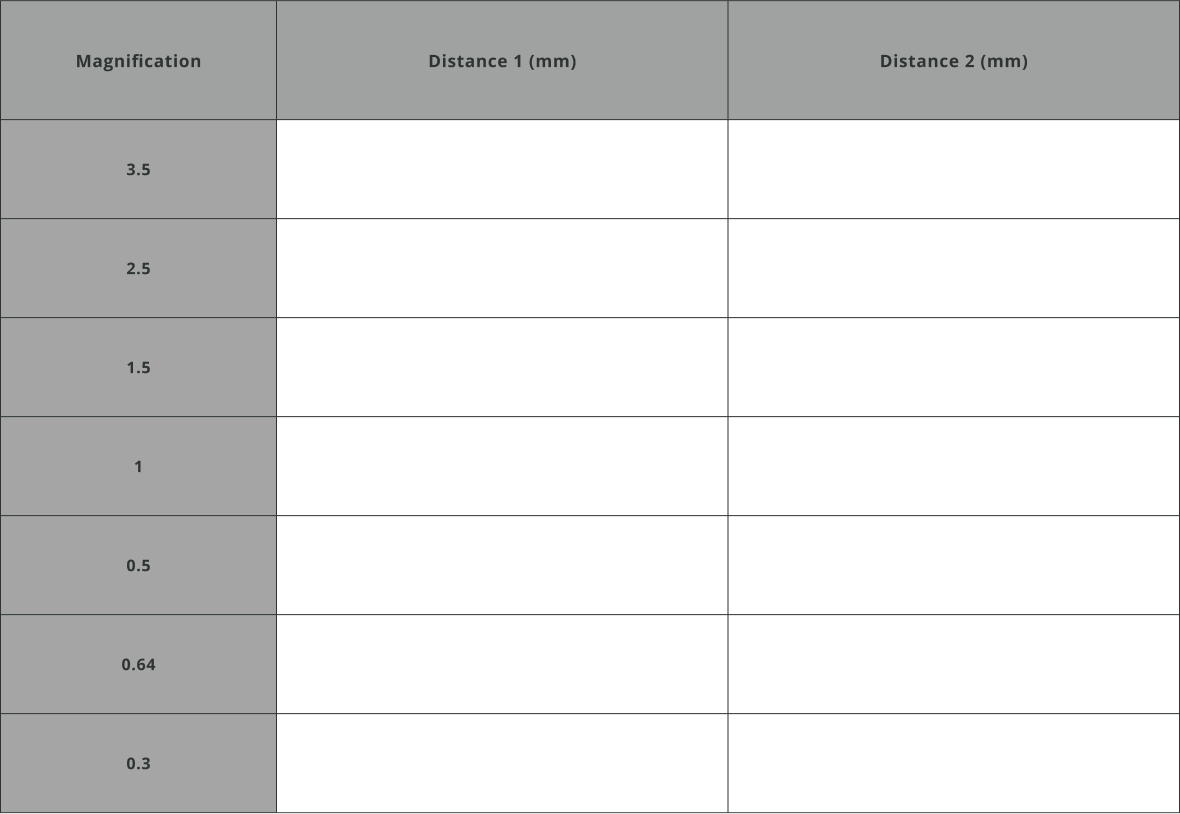
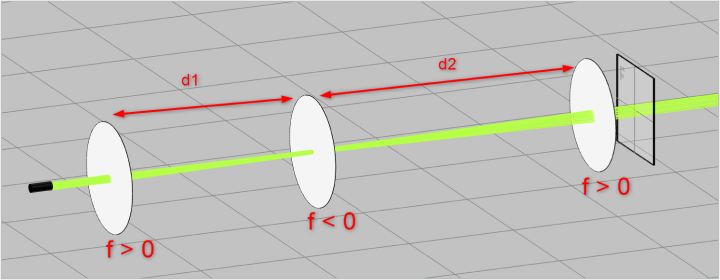
Exercise 3: Defining 3 lenses system - paraxial layout

Exercise 4: Replacing paraxial lens with catalog lenses
- Keep the file open from the previous exercise number 3.
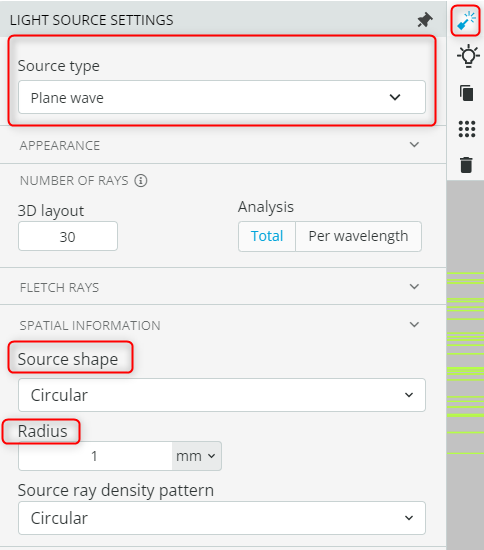
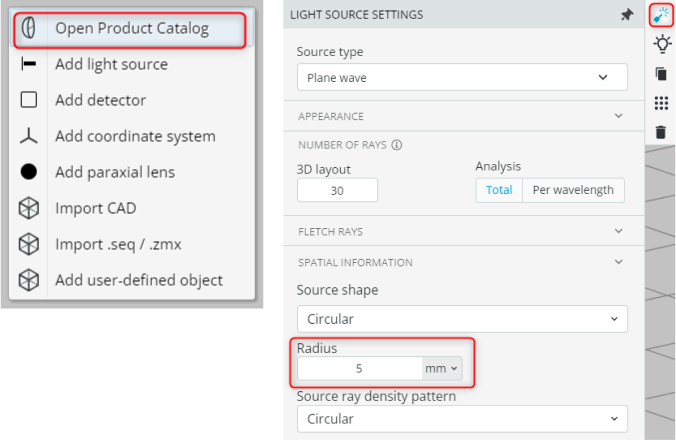
- Change the spatial information of the source to Radius = 5mm. Replace the paraxial lenses with the catalog lenses. This is done by deleting the paraxial lens and adding the catalog lens from the product catalog.The product catalog is accessed by right-clicking on the Pane and selecting Open Product Catalog and then searching for the required part.
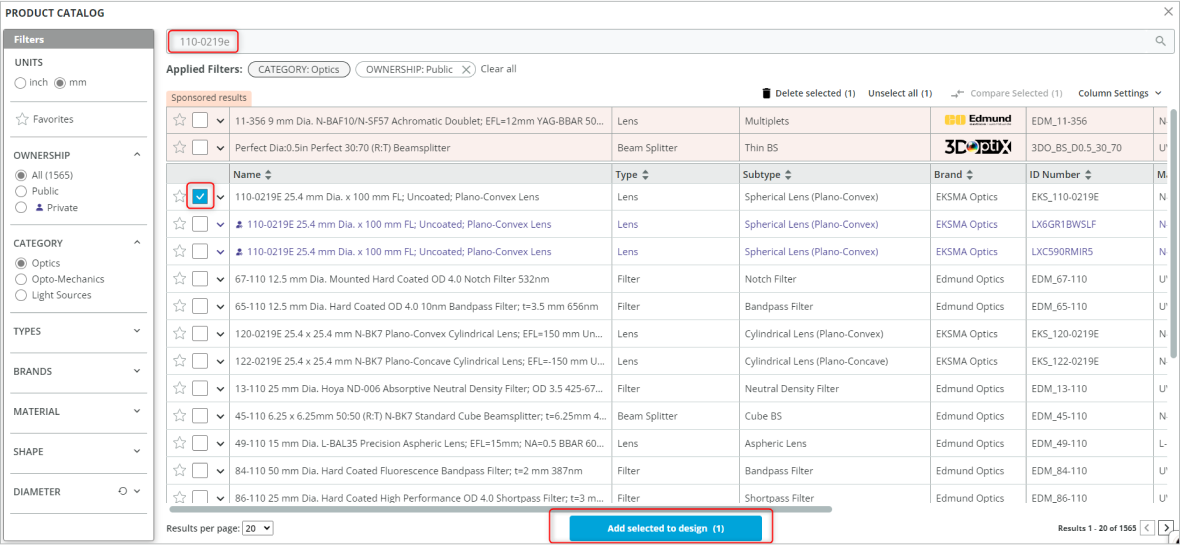
- Replace the paraxial lenses with the following catalog lenses:
- f_1=f_3=100mm= 110-0219E
- f_2=-20mm=114-1108E
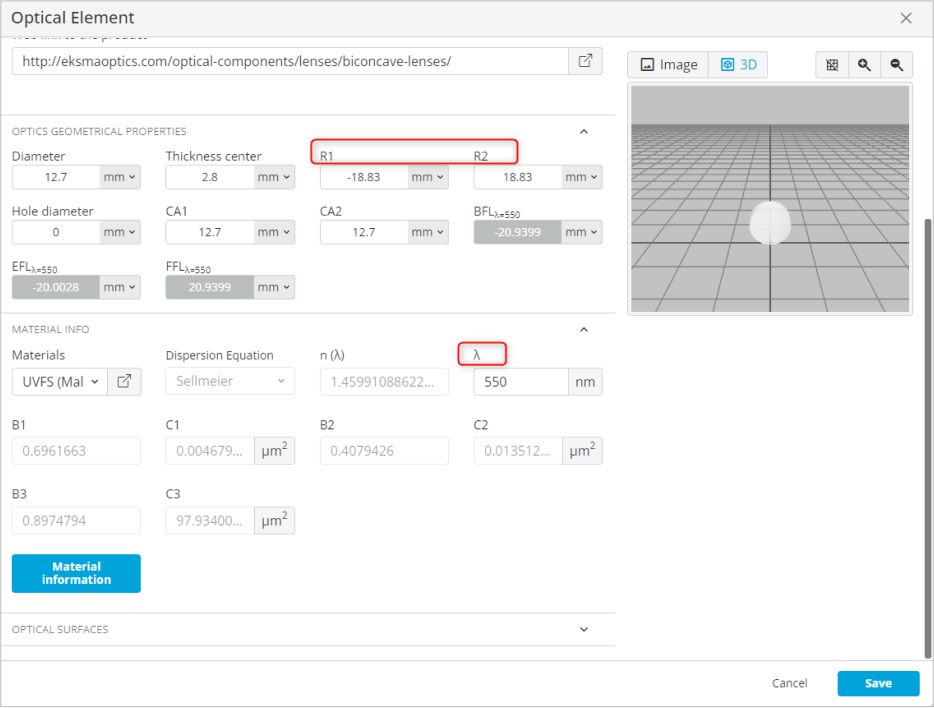
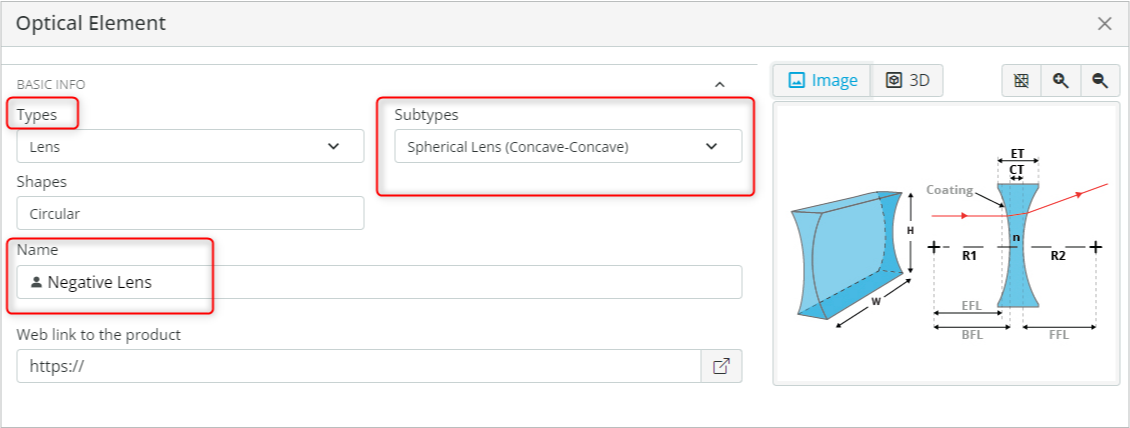
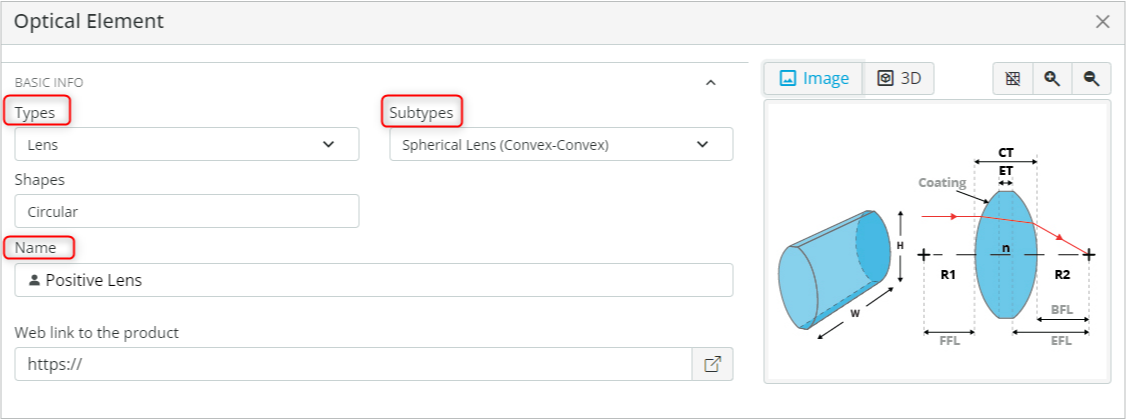
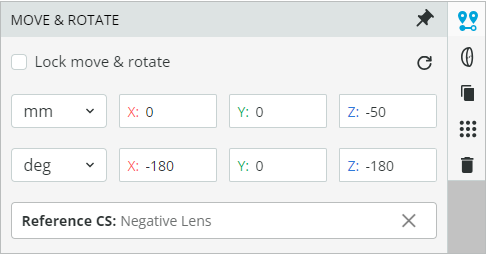
- Access the Optical settings of the f_2 lens, rename it to “Neg_114-1108E 12.7 mm Dia. x -20 mm FL; Uncoated; Double-Concave Lens”, change the radii and wavelength as shown below.
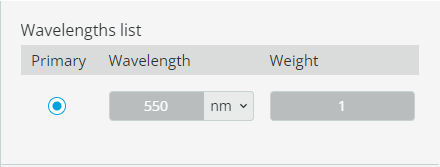
- For f_1, f_2 and f_3 change the wavelength info to 550nm.
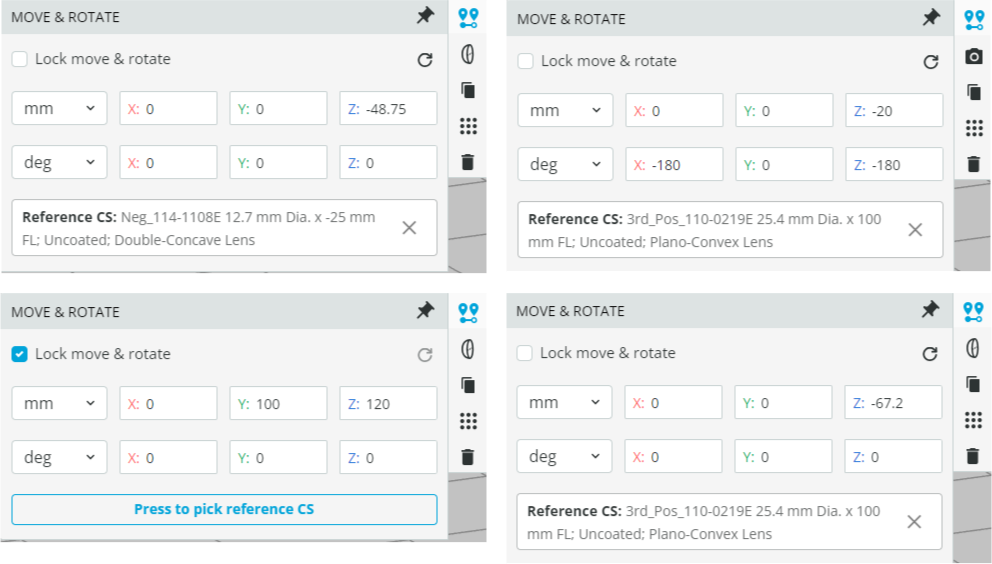
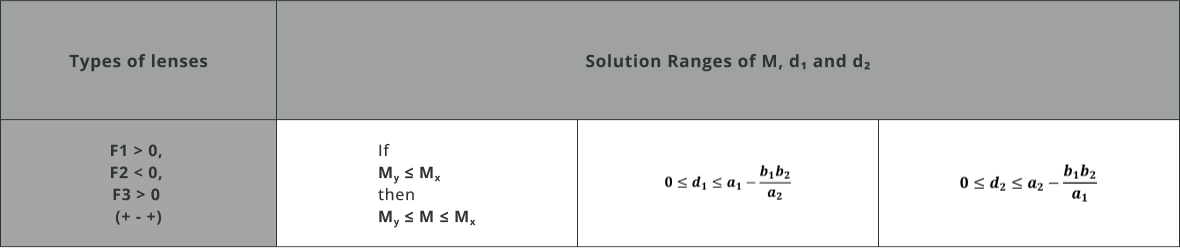
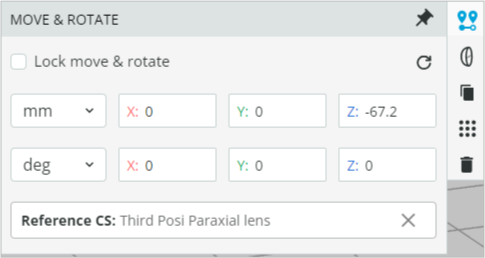
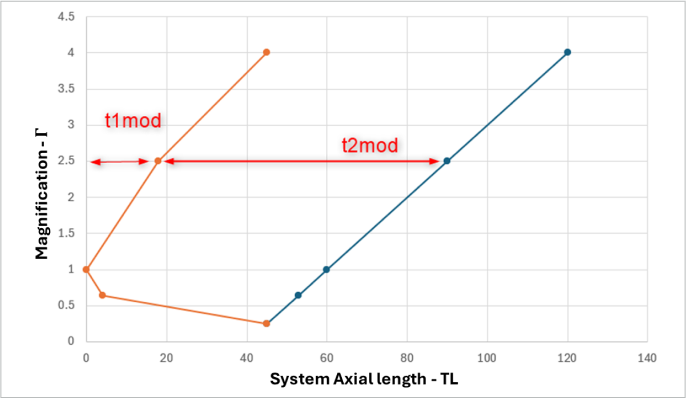
- For the 0.64x telescopic magnification, specify the distance between the lenses as calculated above.
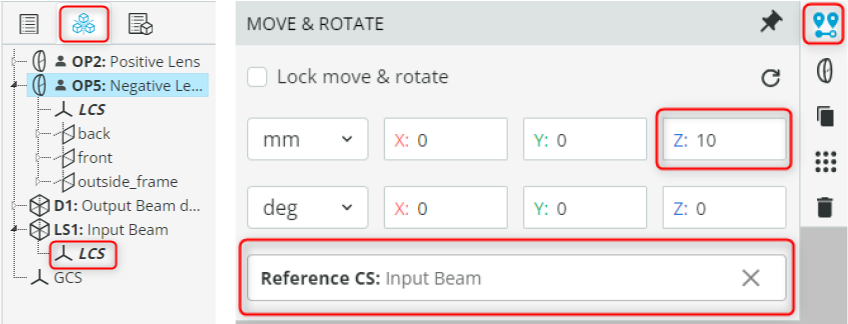
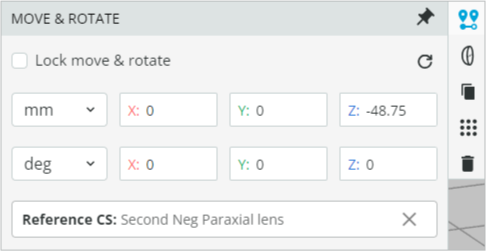
- The first lens (front surface) is referenced to the second lens (front surface), and the second lens (front surface) to the last lens (front surface). While the third lens (front surface) is fixed at 120mm. The references and the coordinates are shown below.
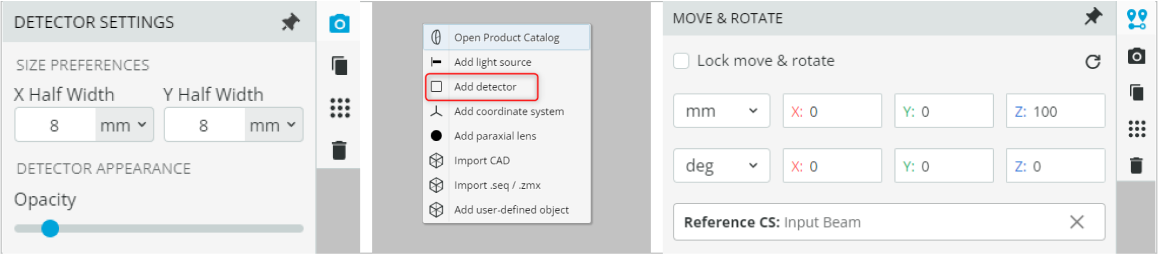
The detector is referenced to the front surface of the first lens.